




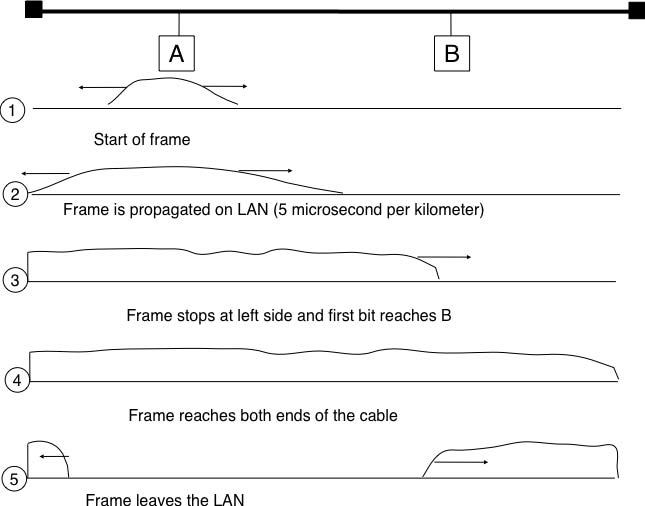
CSMA improves channel utilization compared to ALOHA. However, the performance can still be improved, especially in wired networks. Consider the situation of two terminals that are connected to the same cable. This cable could, for example, be a coaxial cable as in the early days of Ethernet [Metcalfe1976]. It could also be built with twisted pairs. Before extending CSMA, it is useful to understand more intuitively, how frames are transmitted in such a network and how collisions can occur. The figure below illustrates the physical transmission of a frame on such a cable. To transmit its frame, host A must send an electrical signal on the shared medium. The first step is thus to begin the transmission of the electrical signal. This is point (1) in the figure below. This electrical signal will travel along the cable. Although electrical signals travel fast, we know that information cannot travel faster than the speed of light (i.e. 300.000 kilometers/second). On a coaxial cable, an electrical signal is slightly slower than the speed of light and 200.000 kilometers per second is a reasonable estimation. This implies that if the cable has a length of one kilometer, the electrical signal will need 5 microseconds to travel from one end of the cable to the other. The ends of coaxial cables are equipped with termination points that ensure that the electrical signal is not reflected back to its source. This is illustrated at point (3) in the figure, where the electrical signal has reached the left endpoint and host B. At this point, B starts to receive the frame being transmitted by A. Notice that there is a delay between the transmission of a bit on host A and its reception by host B. If there were other hosts attached to the cable, they would receive the first bit of the frame at slightly different times. As we will see later, this timing difference is a key problem for MAC algorithms. At point (4), the electrical signal has reached both ends of the cable and occupies it completely. Host A continues to transmit the electrical signal until the end of the frame. As shown at point (5), when the sending host stops its transmission, the electrical signal corresponding to the end of the frame leaves the coaxial cable. The channel becomes empty again once the entire electrical signal has been removed from the cable.
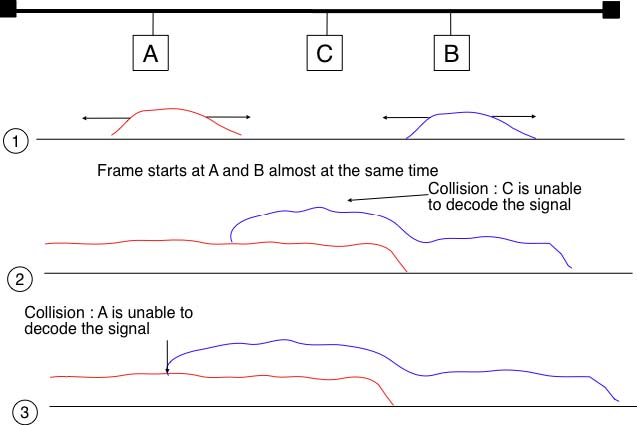
Now that we have looked at how a frame is actually transmitted as an electrical signal on a shared bus, it is interesting to look in more detail at what happens when two hosts transmit a frame at almost the same time. This is illustrated in the figure below, where hosts A and B start their transmission at the same time (point (1)). At this time, if host C senses the channel, it will consider it to be free. This will not last a long time and at point (2) the electrical signals from both host A and host B reach host C. The combined electrical signal (shown graphically as the superposition of the two curves in the figure) cannot be decoded by host C. Host C detects a collision, as it receives a signal that it cannot decode. Since host C cannot decode the frames, it cannot determine which hosts are sending the colliding frames. Note that host A (and host B) will detect the collision after host C (point (3) in the figure below).
As shown above, hosts detect collisions when they receive an electrical signal that they cannot decode. In a wired network, a host is able to detect such a collision both while it is listening (e.g. like host C in the figure above) and also while it is sending its own frame. When a host transmits a frame, it can compare the electrical signal that it transmits with the electrical signal that it senses on the wire. At points (1) and (2) in the figure above, host A senses only its own signal. At point (3), it senses an electrical signal that differs from its own signal and can thus detects the collision. At this point, its frame is corrupted and it can stop its transmission. The ability to detect collisions while transmitting is the starting point for the Carrier Sense Multiple Access with Collision Detection (CSMA/CD) Medium Access Control algorithm, which is used in Ethernet networks [Metcalfe1976] [802.3] . When an Ethernet host detects a collision while it is transmitting, it immediately stops its transmission. Compared with pure CSMA, CSMA/CD is an important improvement since when collisions occur, they only last until colliding hosts have detected it and stopped their transmission. In practice, when a host detects a collision, it sends a special jamming signal on the cable to ensure that all hosts have detected the collision.
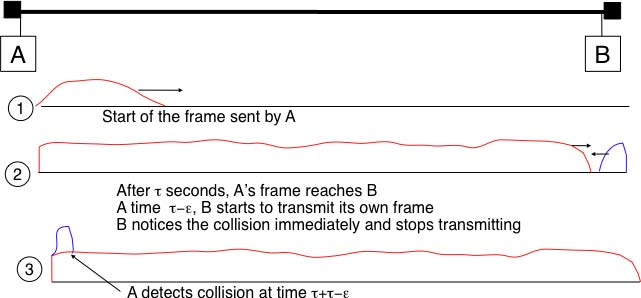
To better understand these collisions, it is useful to analyse what would be the worst collision on a shared bus network. Let us consider a wire with two hosts attached at both ends, as shown in the figure below. Host A starts to transmit its frame and its electrical signal is propagated on the cable. Its propagation time depends on the physical length of the cable and the speed of the electrical signal. Let us use τ to represent this propagation delay in seconds. Slightly less than τ seconds after the beginning of the transmission of A’s frame, B decides to start transmitting its own frame. After E seconds, B senses A’s frame, detects the collision and stops transmitting. The beginning of B’s frame travels on the cable until it reaches host A. Host A can thus detect the collision at time τ − E + τ ≈ 2 × τ. An important point to note is that a collision can only occur during the first 2 × τ seconds of its transmission. If a collision did not occur during this period, it cannot occur afterwards since the transmission channel is busy after τ seconds and CSMA/CD hosts sense the transmission channel before transmitting their frame.
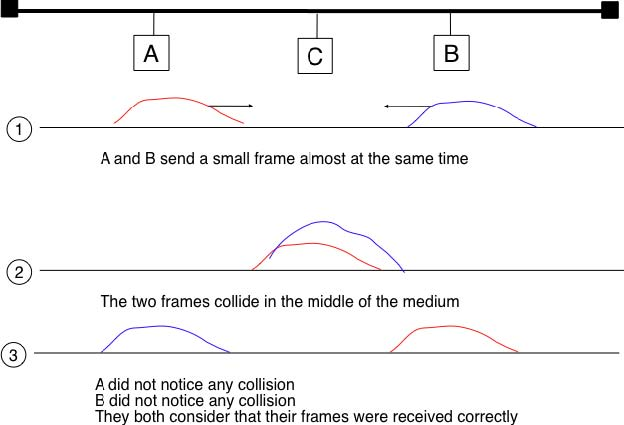
Furthermore, on the wired networks where CSMA/CD is used, collisions are almost the only cause of transmission errors that affect frames. Transmission errors that only affect a few bits inside a frame seldom occur in these wired networks. For this reason, the designers of CSMA/CD chose to completely remove the acknowledgement frames in the datalink layer. When a host transmits a frame, it verifies whether its transmission has been affected by a collision. If not, given the negligible Bit Error Ratio of the underlying network, it assumes that the frame was received correctly by its destination. Otherwise the frame is retransmitted after some delay. Removing acknowledgements is an interesting optimisation as it reduces the number of frames that are exchanged on the network and the number of frames that need to be processed by the hosts. However, to use this optimisation, we must ensure that all hosts will be able to detect all the collisions that affect their frames. The problem is important for short frames. Let us consider two hosts, A and B, that are sending a small frame to host C as illustrated in the figure below. If the frames sent by A and B are very short, the situation illustrated below may occur. Hosts A and B send their frame and stop transmitting (point (1)). When the two short frames arrive at the location of host C, they collide and host C cannot decode them (point (2)). The two frames are absorbed by the ends of the wire. Neither host A nor host B have detected the collision. They both consider their frame to have been received correctly by its destination.
To solve this problem, networks using CSMA/CD require hosts to transmit for at least 2 × τ seconds. Since the network transmission speed is fixed for a given network technology, this implies that a technology that uses CSMA/CD enforces a minimum frame size. In the most popular CSMA/CD technology, Ethernet, 2 × τ is called the slot time 1.
The last innovation introduced by CSMA/CD is the computation of the retransmission timeout. As for ALOHA, this timeout cannot be fixed, otherwise hosts could become synchronised and always retransmit at the same time. Setting such a timeout is always a compromise between the network access delay and the amount of collisions. A short timeout would lead to a low network access delay but with a higher risk of collisions. On the other hand, a long timeout would cause a long network access delay but a lower risk of collisions. The binary exponential back-off algorithm was introduced in CSMA/CD networks to solve this problem.
To understand binary exponential back-off, let us consider a collision caused by exactly two hosts. Once it has detected the collision, a host can either retransmit its frame immediately or defer its transmission for some time. If each colliding host flips a coin to decide whether to retransmit immediately or to defer its retransmission, four cases are possible :
- Both hosts retransmit immediately and a new collision occurs
- The first host retransmits immediately and the second defers its retransmission
- The second host retransmits immediately and the first defers its retransmission
- Both hosts defer their retransmission and a new collision occurs
In the second and third cases, both hosts have flipped different coins. The delay chosen by the host that defers its retransmission should be long enough to ensure that its retransmission will not collide with the immediate retransmission of the other host. However the delay should not be longer than the time necessary to avoid the collision, because if both hosts decide to defer their transmission, the network will be idle during this delay. The slot time is the optimal delay since it is the shortest delay that ensures that the first host will be able to retransmit its frame completely without any collision.
If two hosts are competing, the algorithm above will avoid a second collision 50% of the time. However, if the network is heavily loaded, several hosts may be competing at the same time. In this case, the hosts should be able to automatically adapt their retransmission delay. The binary exponential back-off performs this adaptation based on the number of collisions that have affected a frame. After the first collision, the host flips a coin and waits 0 or 1 slot time. After the second collision, it generates a random number and waits 0, 1, 2 or 3 slot times, etc. The duration of the waiting time is doubled after each collision. The complete pseudo-code for the CSMA/CD algorithm is shown in the figure below.
# CSMA/CD pseudo-code N=1 while N<= max : wait(channel_becomes_free) send(frame) wait_until (end_of_frame) or (collision) if collision detected: stop transmitting send(jamming) k = min (10, N) r = random(0, 2k -1) * slotTime wait(r*slotTime) N=N+1 else : wait(inter-frame_delay) break # end of while loop # Too many transmission attempts
The inter-frame delay used in this pseudo-code is a short delay corresponding to the time required by a network adapter to switch from transmit to receive mode. It is also used to prevent a host from sending a continuous stream of frames without leaving any transmission opportunities for other hosts on the network. This contributes to the fairness of CSMA/CD. Despite this delay, there are still conditions where CSMA/CD is not completely fair [RY1994]. Consider for example a network with two hosts : a server sending long frames and a client sending acknowledgments. Measurements reported in [RY1994] have shown that there are situations where the client could suffer from repeated collisions that lead it to wait for long periods of time due to the exponential back-off algorithm.
- 6500 reads
