




The holonic multi-agent ITS architecture is approbated in the case study. An ITS named MIPITS has been developed using the proposed architecture (Lavendelis & Grundspenkis, 2010). The system supports the traditional classroom tutoring for the undergraduate course “Fundamentals of Artificial Intelligence” taught at Riga Technical University, because after attending lectures a learner can repeat the theory given at the lectures using the learning materials provided by the system and assess his/her knowledge with problems provided by the system. After finishing each problem, learner’s knowledge is evaluated and he/she receives feedback about his/her solution explaining his/her mistakes. The main focus of the system is on problem solving. The following types of problems are included in the initial version of the system: (1) Different types of tests, including single and multiple choice tests and tests, where a learner has to write the answer by him/herself. (2) Search algorithm problems, where a learner has to do a state space search using the specified algorithm and lists OPEN and CLOSED (Luger, 2005). (3) Two person game problems, where a learner has to apply the MINIMAX algorithm or Alpha-Beta pruning to the given state space (Luger, 2005). The system adapts the problems to the following learner’s characteristics. Difficulty level of the problem is adapted to the learner’s knowledge level, practicality of the problem and size of the problem are adapted to the corresponding learner’s preferences provided by the learner during the registration. Finally, the system follows the types of problems given to the learner and tries to minimize the repetition of problems of the same type.
The adaptation of problems is carried out in the problem generation holon showing that such holons can be efficiently used to implement adaptive tutoring. Previously described general algorithm of the heads of open holons is used to generate the most suitable problem. The suitability of the problems to the learner is measured by calculating the weighted sum of the differences between desired values of criteria and real ones. The problem with the minimal weighted sum is considered to be the most suitable one. The following equation is used to calculate the appropriateness of the problem (Lavendelis & Grundspenkis, 2010):

difpref – the preferred difficulty of the task;
difr – the real difficulty of the task;
cd – the weight of the difficulty;
spref – the preferred size of the problem;
sr – the real size of the problem;
cs – the weight of the size;
prpref – the preferred practicality;
prr – the real practicality of the problem;
cp – the weight of the practicality;
ft – the frequency of problem’s type;
cf – the weight of the frequency.
Weights are determined empirically and are the following: cd=2, cs=3, cp=3, cf=6, because with these weights all criteria have significant impact on the appropriateness.
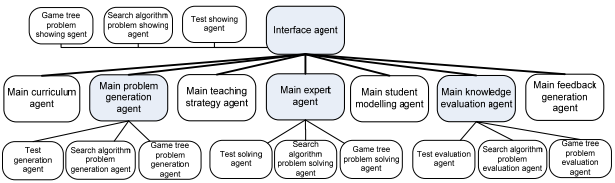
As the MIPITS system has specific functionality with the main focus on problems, the general architecture is customized to meet the particular requirements of the system. There is only one type of materials in the MIPITS system; thus, there is no need for open holons dealing with the materials. The corresponding agents are implemented as monolith agents instead of holons. The main teaching strategy agent generates all materials and the main interface agent visualizes them in the interface. Similarly, there is only one type of the curriculum and it is not changed after generation. The student modelling and feedback agents also do not have complex functionality in the MIPITS system, thus these agents also are implemented in a monolith way. The agents that deal with the problems are implemented as open holons to allow adding new types of problems. At the initial version of the system agents for the described three types of problems are implemented in each of the open holons, namely, the problem generation, the knowledge evaluation, the expert and the interface holons. For example, the problem generation holon contains the head (the main problem generation agent), the test generation agent, the search algorithm problem generation agent and the game tree problem generation agent. The actual architecture of the system is shown in the Figure 12.4 . The heads of open holons are denoted with grey colour.
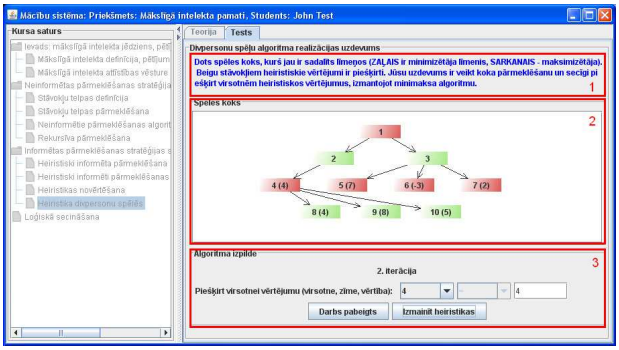
The interface of the MIPITS system consists of two main parts Figure 12.5. The interface is in Latvian, because it is the language of the course. The left side of the main window shows the curriculum. It is shown as a hierarchy. The higher level shows the modules of the course, while lower level shows topics. When the learner chooses the topic to start learning the corresponding learning material is shown in the right side of the interface. The right side is used also to show problems that are given to the learner when he/she submits that he/she has finished the theoretical material and is ready to evaluate his/her knowledge. The layout of the right side differs for various problems. This part of the interface is created and managed by the corresponding body agents of the interface holon. The example of the problem is given in the Figure 12.5. It is an interface for two-person games algorithm MINI-MAX (Luger, 2005). It is created by the two-person games problem visualization agent. It has typical structure for the problems used in the MIPITS system. The top part of the right side (denoted with 1 in Figure 12.5) contains the description of the problem and defines what a learner has to do. The middle part (denoted with 2 in Figure 12.5) contains graphical information. In this case it is the game tree. The bottom part (denoted with 3 in Figure 12.5) contains controls for student to solve the problem. For the particular type of tasks it contains controls for assigning values to the vertexes in the state space. The student has to show how the hierarchical evaluations of the vertexes change during the execution of the algorithm.
The MIPITS system is open – it can be extended with new types of problems by adding four new body agents to corresponding holons: a problem generation agent, an expert agent, a knowledge evaluation agent and a problem visualisation agent for the particular types of problems. The extendibility of the MIPITS system has been proven by adding new type of problems to already running system without changing existing code. A topic about propositional logic and inference was added (Lavendelis & Grundspenkis, 2011).
- 2096 reads
