




feedback
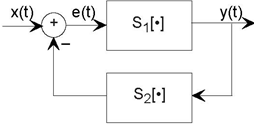
The subtlest interconnection configuration has a system's output also contributing to its input. Engineers would say the output is "fed back" to the input through system 2, hence the terminology. The mathematical statement of the feedback interconnection (Figure 2.12) is that the feed-forward system produces the output: y (t)= S1 (e (t)). The input e (t) equals the input signal minus the output of some other system's output to y (t): e (t)= x (t) − S2 (y (t)). Feedback systems are omnipresent in control problems, with the error signal used to adjust the output to achieve some condition defined by the input (controlling) signal.
For example, in a car's cruise control system, x (t) is a constant representing what speed you want, and y (t) is the car's speed as measured by a speedometer. In this application, system 2 is the identity system (output equals input).
- 3615 reads
